Introduction
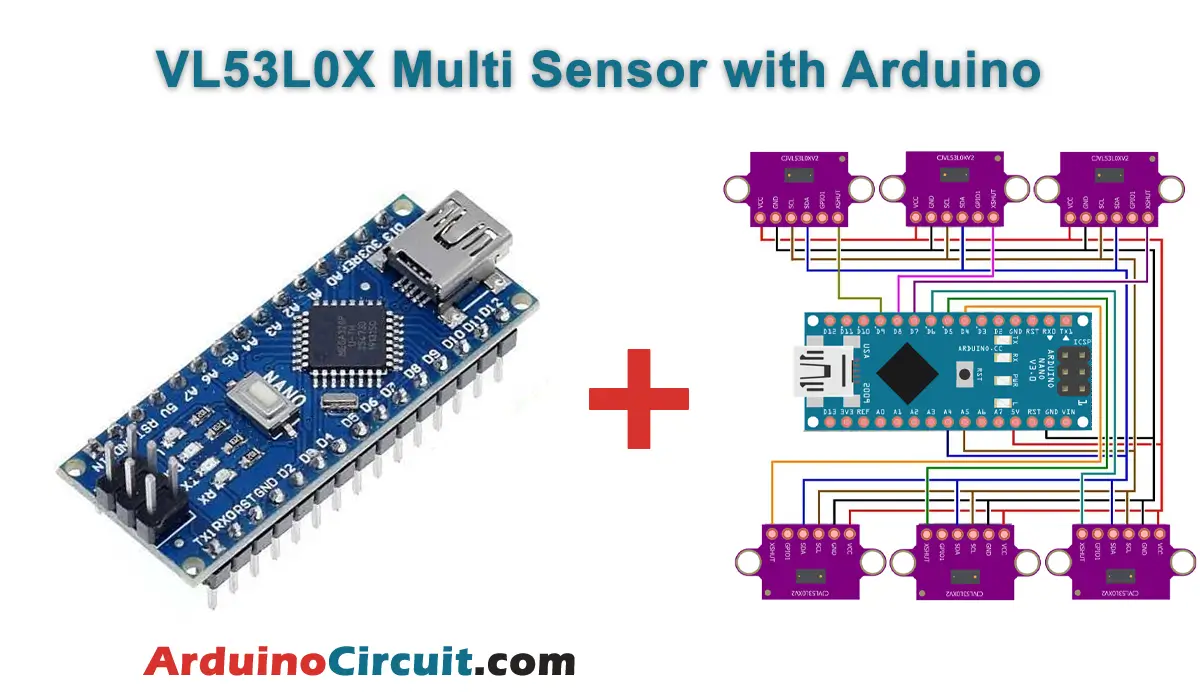
VL53L0X is a time-of-flight sensor that is used to measure distances. In this project, we will demonstrate how to set up multiple VL53L0X sensors. By using multiple sensors, we can create a robot that can detect obstacles in multiple directions. In this tutorial, we will explain how to set up multiple sensors and use them to detect obstacles.
The VL53L0X is a Time of Flight (ToF) ranging sensor that can accurately measure distances up to 2 meters using laser technology. It is a multi-sensor module with an integrated laser emitter, detector, and microcontroller.
Hardware Required
You will require the following Hardware Components for interfacing VL53L0X Multi Sensor with Arduino.
| Components | # | Buy From Amazon |
|---|---|---|
| Arduino Nano | 1 | Buy Link |
| VL53L0X Multi-Sensor | 6 | Buy Link |
| Jumper Wires | Few | Buy Link |
| Breadboard | 1 | Buy Link |
What is VL53L0X Multi Sensor?
The VL53L0X Multi-Sensor is a module that integrates the VL53L0X ToF sensor with a microcontroller, power management unit, and communication interface. The module provides accurate distance measurements, ambient light sensing, and programmable interrupt output.
Pinout

Pin Configuration
| Pin Name | Pin Type |
|---|---|
| VCC | It is the voltage supply pin. |
| GND | It is Ground Pin |
| SCL | It is the digital serial clock input pin. |
| SDA | It is a serial data digital input/output pin for communication. |
| GPIO1 | It is the programmable interrupt output pin. |
| XSHUT | It is an active-low shutdown input pin. |
Specifications
- Operating voltage: 2.8V to 5V
- Range: up to 2 meters
- Accuracy: ±3%
- Measurement rate: up to 60Hz
- Ambient light sensing range: 0.1 to 100,000 lux
- Communication interface: I2C
Features
- Integrated laser emitter and detector
- Low power consumption
- Small form factor
- Interrupt output for range detection and ambient light sensing
- Programmable I2C address
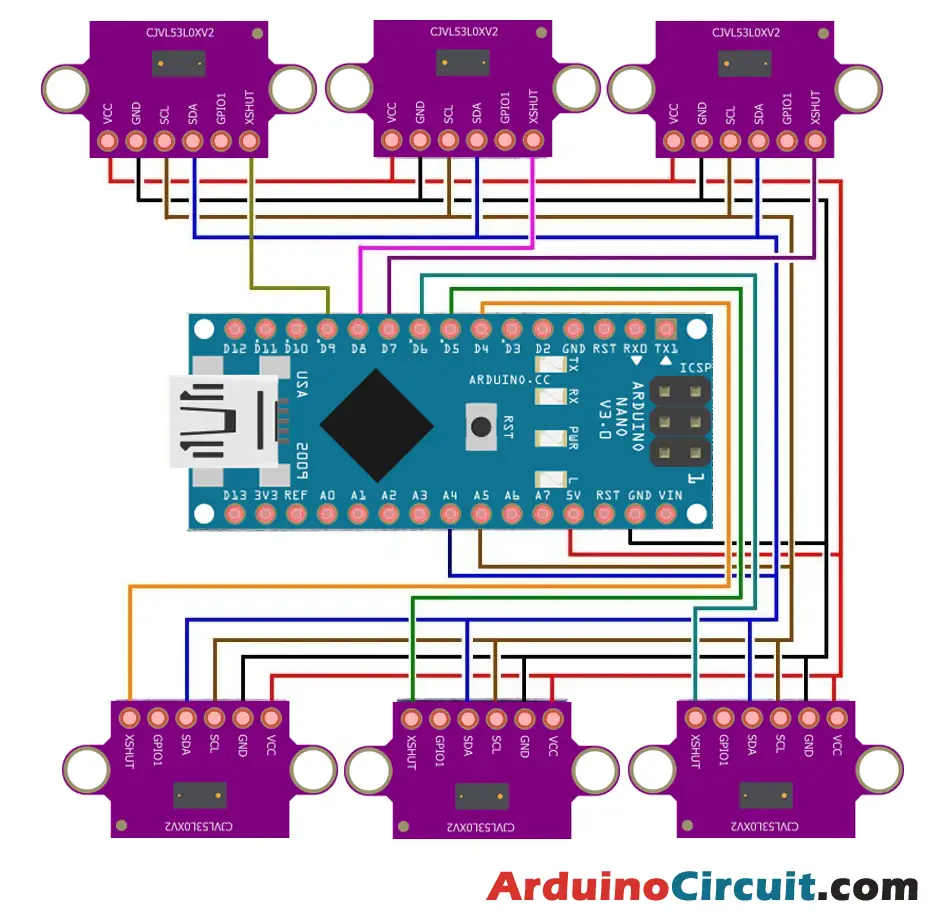
Circuit Diagram
The following circuit shows you the connection of the VL53L0X Multi Sensor with Arduino Please make the connection carefully
Working Explanation
The VL53L0X sensor uses a time-of-flight method to measure distances. The sensor sends out a laser pulse and measures the time it takes for the pulse to bounce back. By knowing the speed of light and the time it took for the pulse to return, the sensor can calculate the distance to the object.
To use multiple VL53L0X sensors, we need to connect each sensor to a separate Arduino pin. We then need to set up each sensor individually by sending commands to the sensor through the I2C interface. Once we have set up each sensor, we can use them to detect obstacles in different directions.
Installing Arduino IDE Software
First, you will require to Download the updated version of Arduino IDE Software and Install it on your PC or laptop. if you Learn How to install the Arduino step-by-step guide then click on how to install Arduino Button given Blow
Installing Libraries
Now when you are Ready to upload the code, to the Arduino Board you will need first to add the Following Libraries in Arduino, If you Learn How to add the library in the Arduino step-by-step guide click on how to install the library Button given Blow
//For more Projects: www.arduinocircuit.com
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor;
VL53L0X sensor2;
VL53L0X sensor3;
VL53L0X sensor4;
VL53L0X sensor5;
VL53L0X sensor6;
int a;
int b;
int c;
int d;
int e;
int f;
void setup()
{
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(500);
Wire.begin();
Serial.begin (9600);
digitalWrite(4, HIGH);
delay(150);
Serial.println(“00”);
sensor.init(true);
Serial.println(“01”);
delay(100);
sensor.setAddress((uint8_t)01);
Serial.println(“02”);
digitalWrite(5, HIGH);
delay(150);
sensor2.init(true);
Serial.println(“03”);
delay(100);
sensor2.setAddress((uint8_t)02);
Serial.println(“04”);
digitalWrite(6, HIGH);
delay(150);
sensor3.init(true);
Serial.println(“05”);
delay(100);
sensor3.setAddress((uint8_t)03);
Serial.println(“06”);
digitalWrite(7, HIGH);
delay(150);
Serial.println(“07”);
sensor4.init(true);
Serial.println(“08”);
delay(100);
sensor4.setAddress((uint8_t)04);
Serial.println(“09”);
digitalWrite(8, HIGH);
delay(150);
Serial.println(“10”);
sensor5.init(true);
Serial.println(“11”);
delay(100);
sensor5.setAddress((uint8_t)05);
Serial.println(“12”);
digitalWrite(9, HIGH);
delay(150);
Serial.println(“13”);
sensor6.init(true);
Serial.println(“14”);
delay(100);
sensor6.setAddress((uint8_t)06);
Serial.println(“15”);
Serial.println(“addresses set”);
sensor.startContinuous();
sensor2.startContinuous();
sensor3.startContinuous();
sensor4.startContinuous();
sensor5.startContinuous();
sensor6.startContinuous();
}
void loop()
{
a=sensor.readRangeContinuousMillimeters();
Serial.print(a);
Serial.print(” “);
b=sensor2.readRangeContinuousMillimeters();
Serial.print(b);
Serial.print(” “);
c=sensor3.readRangeContinuousMillimeters();
Serial.print(c);
Serial.print(” “);
d=sensor4.readRangeContinuousMillimeters();
Serial.print(d);
Serial.print(” “);
e=sensor5.readRangeContinuousMillimeters();
Serial.print(e);
Serial.print(” “);
f=sensor6.readRangeContinuousMillimeters();
Serial.println(f);
//delay(100);
}
Code
Applications
- Obstacle detection for robotics projects
- Automation in industries for detecting objects at different locations
- Security systems for detecting intruders from multiple directions
- Traffic control systems to detect vehicles and pedestrians from multiple directions
- Monitoring systems to detect changes in the environment from different directions
Conclusion
VL53L0X sensors are a powerful tool for distance measurement and obstacle detection. By setting up multiple sensors, we can create a robot that can detect obstacles in multiple directions. The applications of this technology are vast and can be used in various industries. By understanding how to set up multiple sensors, we can explore the full potential of VL53L0X sensors and create innovative solutions to real-world problems.